北理工團隊在具身空間仿真平臺建設方面取得重要成果
發布日期:2025-03-16 供稿:集成電路與電子學院 攝影:集成電路與電子學院
編輯:李曉雨 審核:薛正輝 閱讀次數:
3月14日,北京理工大學集成電路與電子學院周治國副教授團隊與蘇州同元軟控信息技術有限公司聯合推出基于MWORKS的具身空間仿真平臺(Embodied Space Simulation Platform)框架,探索形成具身智能無人船案例。
具身信息物理系統(Embodied Cyber-Physical System,ECPS)是一種將具身智能體深度集成到信息物理系統框架中的新型系統架構。它不僅包含了傳統CPS中的物理系統、網絡系統和信息系統,還特別強調具身智能體在其中的核心作用。具身空間(Embodied Space)是一個綜合性的智能環境,有機結合了物理空間、虛擬空間和數據空間,融合了虛擬現實、計算通信、感知融合、決策推理和機器人控制等多種先進技術。
基于MWORKS的具身空間仿真平臺是一個高度綜合的人工智能平臺,能夠實現具身空間建模、無人系統建模與仿真、智能體開發與訓練、實地部署與測試多項功能。它通過集成物理空間、虛擬空間和數據空間,支持無人系統的感知、學習、推理和行動,旨在提升無人系統的具身智能。通過其關鍵模塊(如虛擬仿真引擎、生成智能引擎和推理進化引擎等)來實現具身空間的構建和功能支持。
該平臺采用三維虛擬引擎構建高保真場景,基于MWORKS平臺構建智能體信息物理融合虛擬仿真環境,支持復雜場景動態建模及多智能體系統的集群協同訓練,涵蓋無人機、無人車、機器狗等無人系統的導航、決策與交互任務。通過融合強化學習框架、ROS通訊協議及Python算法接口,提供從虛擬仿真到數字孿生的全鏈路閉環驗證能力,支持用戶快速部署自定義算法,并實現自主導航、環境感知、任務抓取等功能的跨場景適配,為工業自動化、智慧城市及機器人研發提供安全、高效、可擴展的智能訓練基礎設施。
具身空間模擬器(Embodied Space Simulator,ES-Sim)
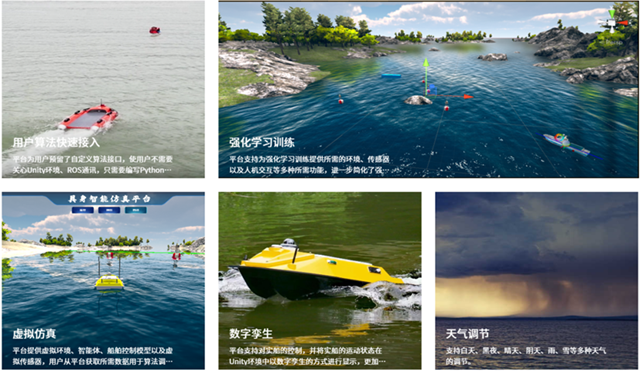
具身智能無人船是具身空間仿真平臺的典型應用案例。由基于MWORKS的數字無人船、基于ROS的無人船開源框架、基于Unity的虛擬三維仿真引擎、基于PyTorch的深度強化學習神經網絡,并集成了deepseek大模型5部分組成。
基于MWORKS平臺構建的無人船數字樣機包括三自由度本體模型和導航控制算法,無人船本體模型能夠考慮無人船風、浪、流等各種擾動的情況下實現無人船速度、航向角等航行參數的理論計算,既為航線決策和路線規劃提供理論依據,又能夠與導航控制算法形成控制閉環,在虛擬空間內實現算法的設計驗證。運行過程中,系統支持動態調整環境參數(風浪流強度、障礙物分布),并通過PyTorch的在線學習機制持續優化策略網絡,確保無人艇在復雜場景下的自主導航與任務適應性。
通過deepseek大模型實現自然語言交互與智能化任務管理。系統支持語音/文本指令輸入(如“繞行障礙”“切換航線”“多目標巡檢”),大模型解析指令后,結合實時感知數據(激光雷達、視覺信息)與船舶狀態,動態生成任務優先級與局部路徑策略,并調用強化學習模塊(PPO/TD3)優化決策指令。針對復雜任務(協同作業、動態場景適配),通過ROS通信聯動數字樣船與仿真環境,自動拆解任務為可執行子目標,調整航行參數與路徑規劃權重。訓練階段融合歷史交互數據與強化學習獎勵反饋,優化指令-動作映射邏輯,提升系統在未知場景下的語義理解與任務泛化能力,形成“人類指令-智能決策-閉環驗證”的一體化交互鏈路。
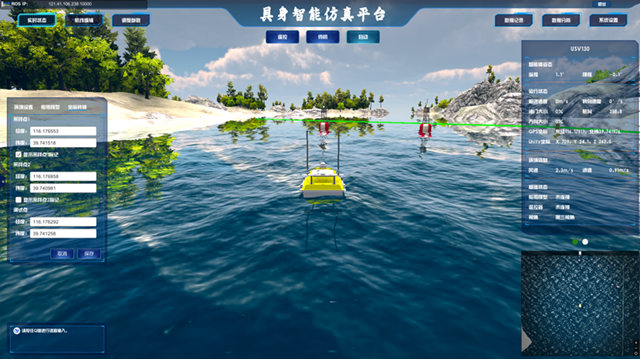
基于Unity虛擬仿真環境加載預設水域場景與船舶數字樣機,并通過ROS-TCP通信協議綁定傳感器數據流(激光雷達、視覺相機)與物理引擎參數;在ROS框架內啟動避障算法節點,加載預訓練的PPO/TD3強化學習模型及監督學習策略,同步運行MWORKS.Sysplorer進行船舶動力學計算;運動控制模塊根據實時決策指令(路徑規劃、避障角速度)驅動數字樣船模型,并通過ROS Topic反饋船舶位姿、環境交互狀態至仿真界面;最終形成“感知數據采集-算法在線推理-控制指令執行-物理狀態回傳”的實時閉環。運行過程中,系統支持動態調整環境參數(風浪流強度、障礙物分布),并通過PyTorch的在線學習機制持續優化策略網絡,確保無人艇在復雜場景下的自主導航魯棒性與任務適應性。
具身空間仿真平臺案例:具身智能無人船
同時,團隊正在積極推動開設《具身智能仿真與建模》課程和相關教材編寫工作,教材將系統性地闡述具身智能的背景知識、研究現狀及主流框架,介紹基于MWORKS具身物理信息系統建模和仿真的基礎知識,確保讀者能夠從理論到實踐全面掌握具身智能的核心內容。并將重點介紹基于MWORKS的具身智能框架,涵蓋ROS(機器人操作系統)、三維虛擬仿真環境以及MWORKS計算引擎等內容,充分展現國產化仿真平臺在具身智能領域的強大實力和廣泛應用前景。
文獻鏈接:https://mp.weixin.qq.com/s/oDT-AFxG6E724tVcsJAKhA
分享到: